



مناور تنسيق ديكارتي علوي تلقائي للصفيحة العلوية
المتطلبات العامة لـ مناور تنسيق ديكارتي علوي تلقائي للصفيحة العلوية
1. تصميم روبوت ذو محورين للتعامل مع الإحداثيات الديكارتية ، والذي يمكنه تنفيذ معالجة أوتوماتيكية ثنائية الأبعاد لقطع العمل.
2. الروبوت يعتمد نوع الجمالون ، هيكل المحور Z المفرد ، ويحمل التثبيت على شكل مخلب.
3. مواصفات قطعة العمل الواحدة: قطر 230 مم ، عرض 1000 مم ، وزن 60 كجم.
4. يجب أن يقوم روبوت المناولة ذو المحورين بإكمال عمل المناولة في غضون الوقت المحدد.
الحلول التقنية لـ مناور تنسيق ديكارتي علوي تلقائي للصفيحة العلوية
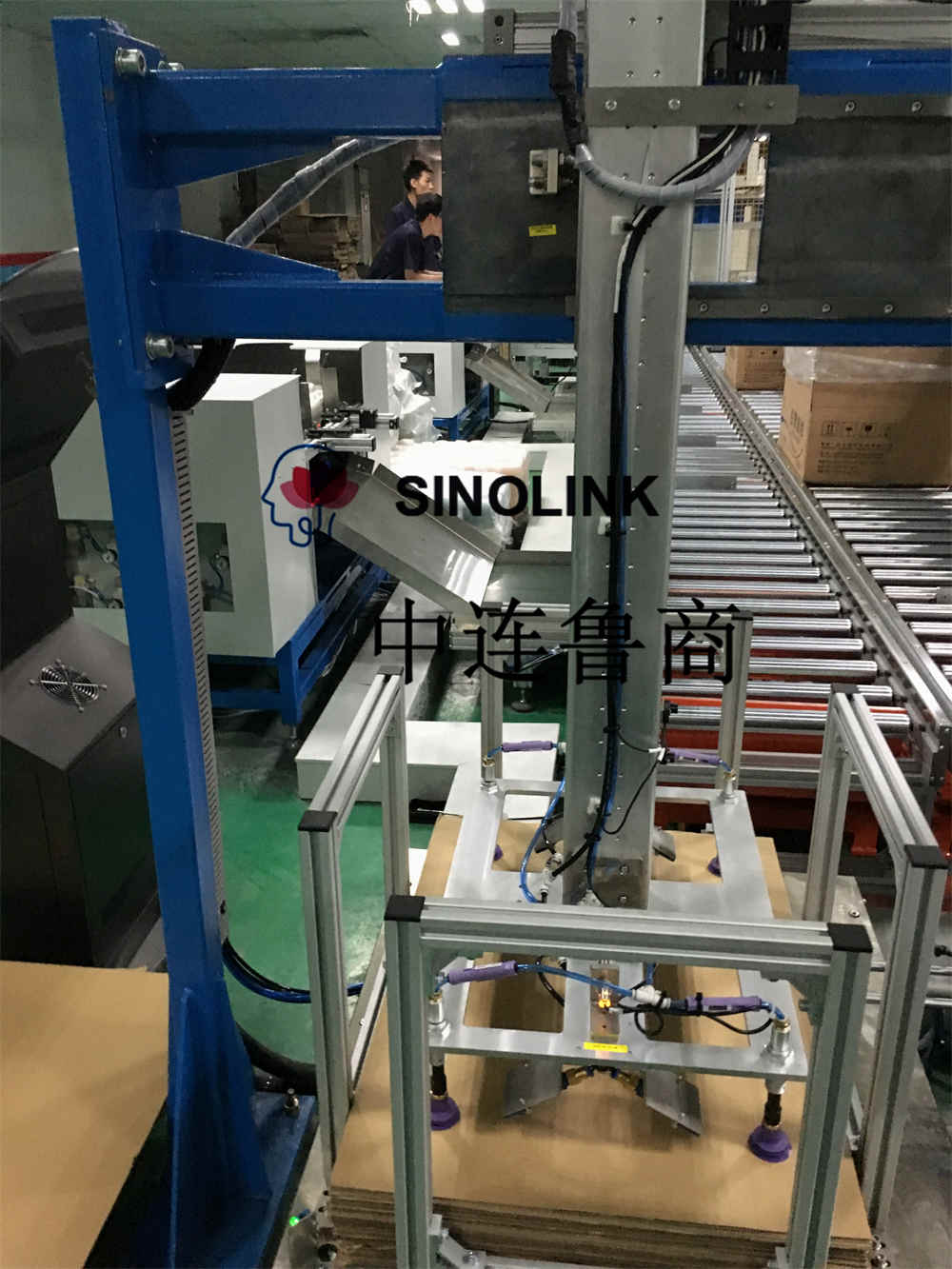
الشكل 1 هو التخطيط العام لحل الروبوت ذي المحورين الموصى به. الأجزاء الرئيسية التي يحتوي عليها هي كما يلي:
1. روبوت مناولة ذو محورين.
2. قاعدة الروبوت والقوس.
3. نظام التحكم الآلي والصندوق الكهربائي ، إلخ.
4. شبكة حماية أمان الروبوت ، إلخ.

يتم عرض تعريفات المحور X والمحور Z للروبوت في الشكل 1 ، وسيتم تصميم آلية القابض. هذه الخطة ليست سوى خطة أولية ، والتي ينبغي مراجعتها وتحسينها بعد مزيد من المناقشة والتوضيح من قبل الطرفين. تم تصميم التصميم النهائي في شركتك حتى يرضي كلا الطرفين. يوضح الشكل 2 الحالات السابقة للرجوع إليها.
مقدمة عن الأجزاء الرئيسية للروبوت
1. المحور السيني للروبوت:
نستخدم وحدة الحركة الخطية كمحور X ، والذي يستخدم حزامًا مسننًا دقيقًا لنقل الحمولة. يمكن استخدامه بمفرده أو بالتوازي مع وحدتي حركة خطية لنقل الحركة العملاقة. يتم تثبيت وحدة الحركة الخطية على مستوى ، ولا يتحرك محرك الحركة المنزلق ، ويمكن استخدامه للحركة لمسافات طويلة على المستوى.
يتحرك الروبوتان المشتركان إلى الأمام والخلف بضربة: 6000 مم
روبوتان مشتركان يتحركان شوطًا صعودًا وهبوطًا: 500 مم
شوط الحركة إلى الأمام والخلف لإنسان آلي واحد: 3000 مم
روبوتان مشتركان يتحركان شوطًا صعودًا وهبوطًا: 500 مم
الحركة الأمامية والخلفية: محرك محرك ، قوة محرك 1.5kw
حركة صعودا وهبوطا: محرك محرك ، محرك قوة 1.5kw
2. مخطط المحور Z للروبوت:
يتبنى المحور Z وحدة حركة خطية بمحور دوار ، وموجهين توجيه خطي ، ومحرك حزام متزامن دقيق ، والمعلمات المحددة للمحور Z مع شريحة قياسية واحدة هي نفسها تلك الخاصة بالمحور X. يظهر الرسم التخطيطي الفعلي في الشكل 4. محرك السيرفو عبارة عن محرك معزز بالتيار المتردد مزود بفرامل إمساك.

3. قاعدة الروبوت
إنها تعتمد طريقة الأجزاء الملحومة وتتصل بالأرض من خلال المراسي. يظهر مخطط النموذج الأساسي والرسم البياني المادي في الشكلين 5 و 6.


4. نظام التحكم
يعتمد نظام التحكم في الروبوت Siemens PLC ، والطراز المحدد ، يتم تحديد عدد منافذ HMI و I / O لشاشات اللمس الداعمة وفقًا للاحتياجات المحددة.
1. العمل الذي سيتم الانتهاء منه عن طريق نظام التحكم PLC
1) أدرك وظيفة التحكم في عملية المناولة والتغذية
2) مع وظيفة التحكم في التحميل والتفريغ اليدوي والآلي
3) إعادة برمجة وتحسين عملية الإنتاج (بكلمة مرور)
4) من الضروري ضبط وظيفة المنطقة الآمنة ، واكتشاف إشارة المستشعر بدلاً من كل إجراء في جميع الإجراءات وتنسيق المصافحة مع آلة الغزل على مستوى الإشارة.
5) يمكنك اختيار PLC بوظيفة اتصال Ethernet أو وظيفة Profibus لتحقيق إدارة البيانات.
6) يمكن للمعلمات نقل البيانات والبرامج من خلال USB وبطاقة CF ووسائط أخرى
7) يمكن إجراء حركة متعددة المحاور في نفس الوقت
8) ثبات عالي ، سرعة تشغيل عالية ، تسارع وتباطؤ عالي.

مزيد من المعلومات ، يرجى الاتصال بنا في أي وقت.
حرب
ال WhatsApp: +86 15634865861







